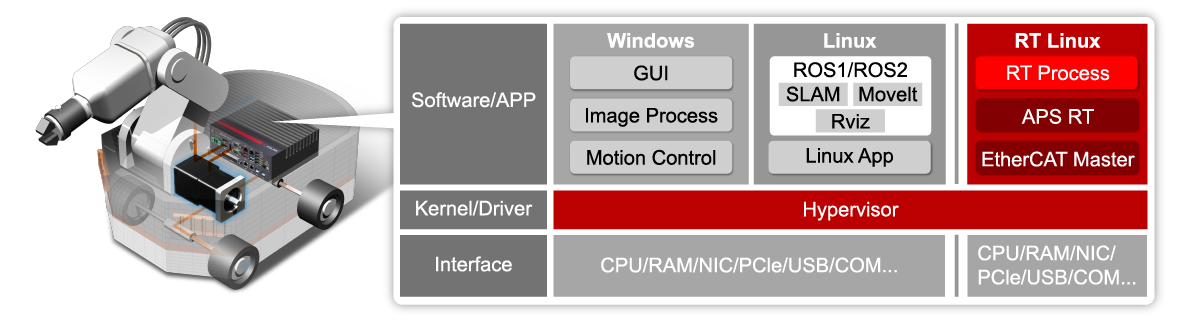



ADLINK has identified the pain points of AMR developers and pioneered the integration of software-defined EtherCAT into the ROS 2 controller. The ROS 2 controller can directly control the operation of motors and robotic arms via the EtherCAT communication protocol, which not only eliminates the hardware costs of motor and robotic arm controllers, but also saves time that would be spent integrating the navigation controller with the motor and robotic arm controllers.
EtherCAT technology is commonly used for industrial control, reducing the dependence on specific suppliers of motors and robotic arms, and making AMR development and production more flexible.
Panasonic adopted ADLINK's Software-defined EtherCAT + ROS 2 solution and integrated it with its EtherCAT motor to complete the development of AMR in only two months. This rapid development solution made its debut at the International Robot Exhibition (iREX) in Japan in March of 2022.