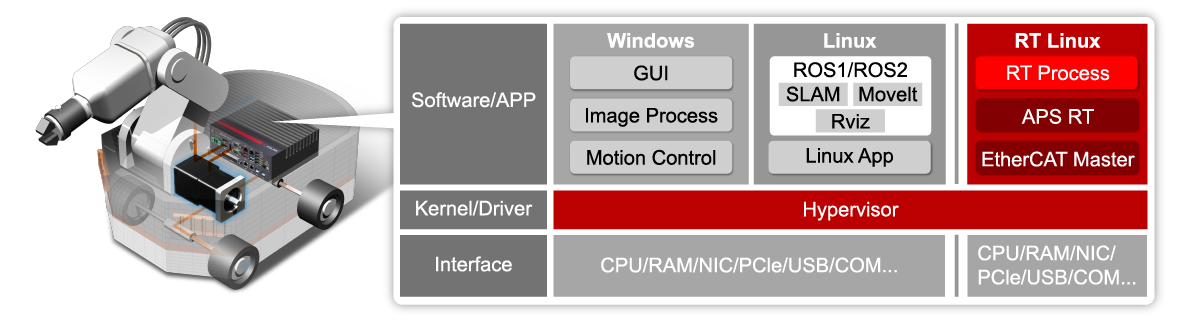


凌華科技觀察到 AMR 開發廠商的痛點,首創將軟體定義 EtherCAT 整合進 ROS 2 控制器,可透過 ROS 2 控制器以 EtherCAT 通訊協定直接控制伺服馬達與機械手臂的運作,不僅免除下位機、手臂控制器的硬體成本,更節省上位機與下位機/手臂控制器整合的時間成本;同時,透過工業控制普及的 EtherCAT 技術,可降低對特定供應商的依賴,讓 AMR 的開發與生產更具彈性。
Panasonic 採用凌華科技 Software-defined EtherCAT 結合 ROS 2 的解決方案,搭配其 EtherCAT 伺服驅動器及馬達,僅利用兩個月的時間即完成 AMR 的開發,此快速開發解決方案已於 2022 年 3 月在日本 iREX 2022 (International Robot Exhibition) 展會首次亮相。