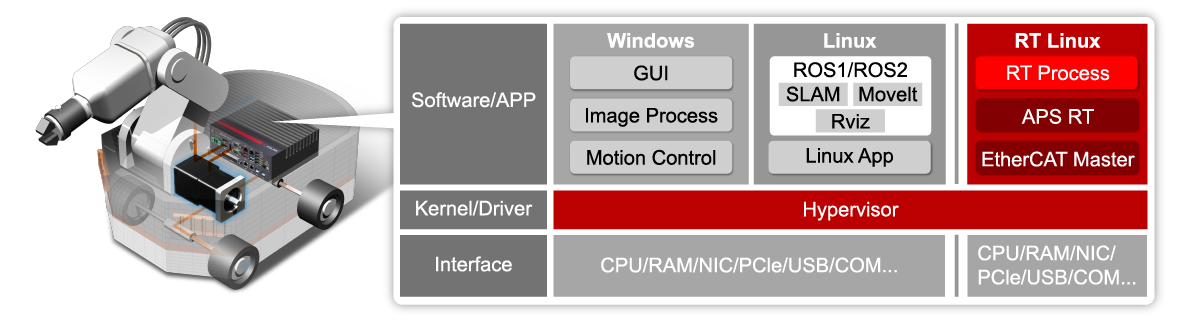



ADLINKはAMR開発者の悩みを特定し、ソフトウェア定義のEtherCATをROS 2コントローラに統合することに先駆的に取り組みました。ROS 2コントローラはEtherCAT通信プロトコルを介してモーターやロボットアームの動作を直接制御することができ、モーターやロボットアームのコントローラのハードウェアのコストを削減するだけでなく、ナビゲーションコントローラとモーターやロボットアームのコントローラの統合に費やされていた時間を短縮することができます。
EtherCAT技術は、産業用制御として一般的に使用されており、モーターやロボットアームの特定のサプライヤーへの依存を減らし、AMRの開発および生産をより柔軟にすることができます。
パナソニックは、ADLINKのソフトウェア定義のEtherCAT + ROS 2ソリューションを採用し、EtherCATモーターと統合して、わずか2ヶ月でAMRの開発を完了させました。この迅速な開発ソリューションは、2022年3月に日本で開催された国際ロボット展(iREX)でデビューを果たしました。