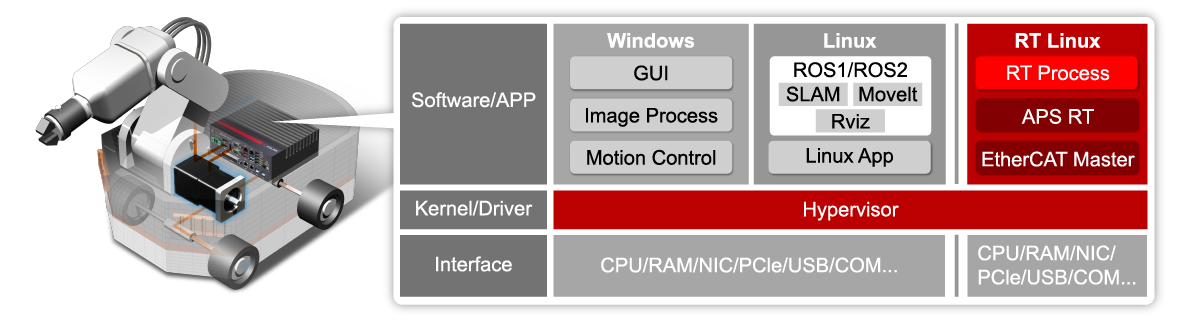



에이디링크는 AMR 개발자의 고충을 이해하고 소프트웨어-정의 EtherCAT을 ROS 2 컨트롤러에 통합하는 데 앞장서 왔습니다. ROS 2 컨트롤러는 EtherCAT 통신 프로토콜을 통해 모터와 로봇암의 작동을 직접 제어할 수 있습니다. 따라서 모터 및 로봇암 컨트롤러의 하드웨어 비용 뿐만 아니라, 내비게이션 컨트롤러를 모터 및 로봇암 컨트롤러와 통합하기 위한 노력과 시간도 절약됩니다.
EtherCAT 기술은 일반적으로 산업 제어에 사용되어, 특정 모터 및 로봇 암 공급업체에 대한 의존도를 줄이고 AMR 개발 및 생산을 보다 유연하게 만듭니다.
파나소닉은 에이디링크의 소프트웨어-정의 EtherCAT + ROS 2 솔루션을 채택하고 EtherCAT 모터와 통합하여 단 2개월 만에 AMR 을 개발했습니다. 이 신속한 개발 솔루션은 2022년 3월 일본에서 열린 국제 로봇 전시회(iREX)에서 첫선을 보였습니다.